Test ROS2
Open two terminals on DEBIX desktop.
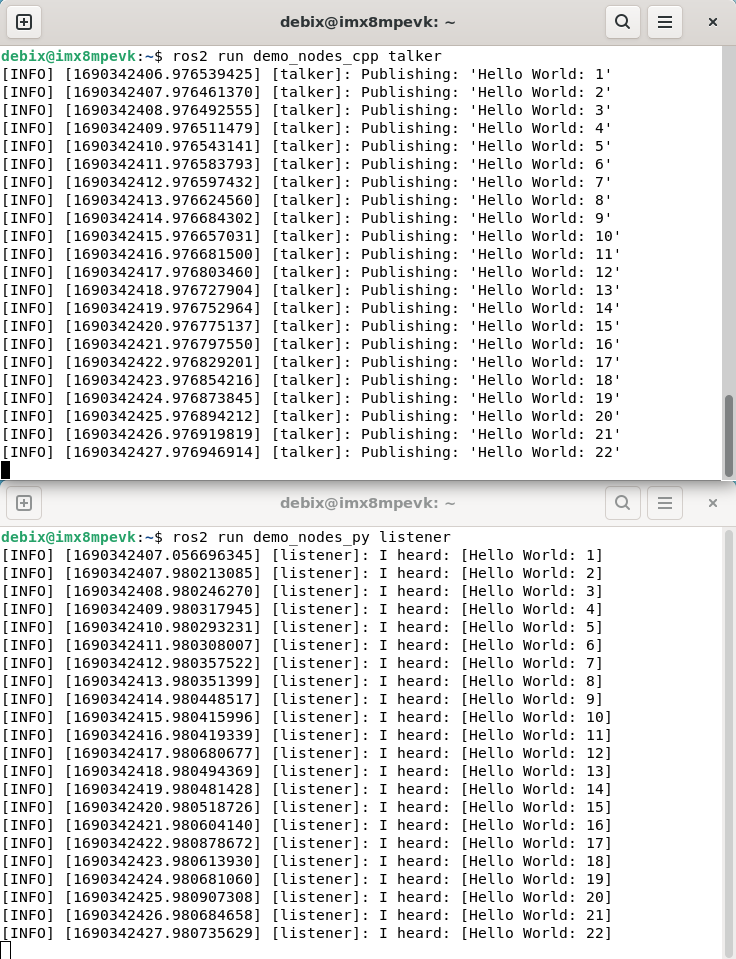
Terminal 1 runs the talker node, run the command:
ros2 run demo_nodes_cpp talker
Terminal 2 runs the listener node, run the command:
ros2 run demo_nodes_py listener
The two terminals show that the talker is posting a message and the listener receives the message posted by the talker.
1. Install the V4L2 software package, run the command:
sudo apt-get install ros-humble-v4l2-camera
Support DEBIX Camera Module
2. Use of the V4L2 software package
Note:
Take IMX219 camera for example, the device tree is imx8mp-debix-core-ar1335.dtb, and the device node is /dev/video2
l Run the camera node
ros2 run v4l2_camera v4l2_camera_node --ros-args -p video_device:=/dev/video2 -p output_encoding:=yuv422_yuy2
l View topic
ros2 topic list

l Install dependencies
sudo apt-get install qtwayland5
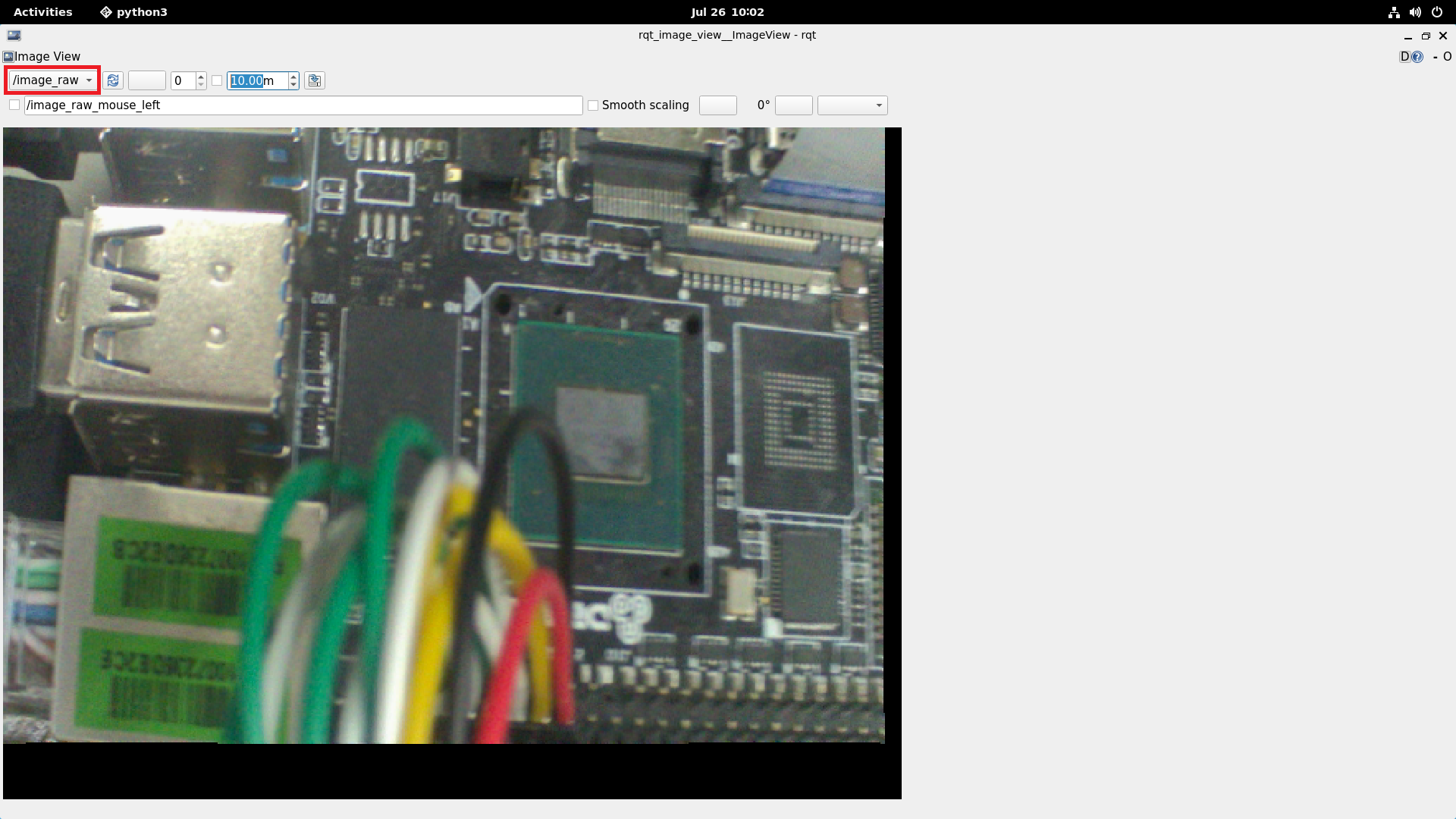
l open a terminal on your desktop and run the following command to subscribe and display the image data on the /image_raw topic
ros2 run rqt_image_view rqt_image_view
l Select /Image_raw to view the image data on the /image_raw topic.